|
|
|
| |
|
|
| |
|
|
| |
Acontis EtherCAT |
|
|
|
|
| |
Acontis Technologies is a leading provider for EtherCAT Technology, Windows real-time
software and Real-Time Virtualization/Hypervisor Technology.
Our company is known for high quality products "Made in Germany". Many blue chip
customers world-wide use our products.
|
|
|
|
|
| |
|
|
|
EC-Master
|
|
| |
|
|
| |
The EC-Master Stack is designed and optimized to run on different embedded (real time)
operating systems. Already existing implementations are available Linux (with and
without Real-Time), Microsoft Windows® 10/11, Wind River VxWorks,
BlackBerry QNX,
IntervalZero RTX64, TenAsys INtime®, Integrity, Xenomai, On Time
RTOS-32, RTEMS,
FreeRTOS, eCos, TI-RTOS, T-Kernel and more operating systems. The EtherCAT MainDevice
stack, formerly Master, can be ported on any other embedded operating systems.
|
|
| |
|
|
| |
|
|
| |
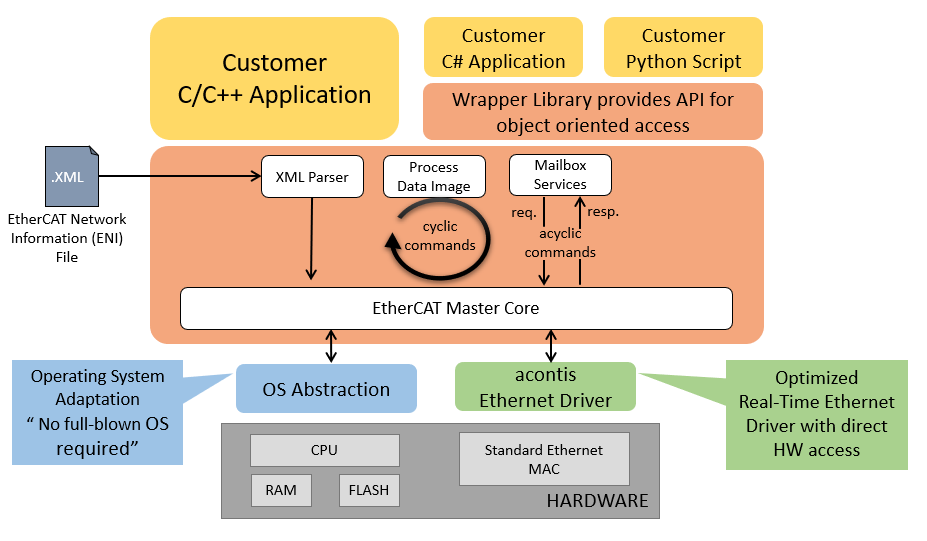
- Application Programming Interface (API): Programming the EtherCAT MainDevice core
in C/C++, C# and Python.
- EtherCAT MainDevice Core: The key EtherCAT MainDevice functionality in the core
layer. All protocol handling, e.g. process data transfer and mailbox protocols (CoE,
EoE, FoE, AoE, SoE) are executed here. This is complemented by sophisticated
diagnosis features.
- Real-time Ethernet Driver: Data exchange between MainDevice and SubordinateDevice
(SubDevice), formerly Slave. Zero-copy and/or polling techniques together with the
core layer are supported to achieve best real-time performance and minimize CPU
load.
- MainDevice and Network Configuration: The integrated XML parser supports the
EtherCAT Network Information (ENI) file defined in the EtherCAT specification.
- Operating System Layer: The only OS specific layer. All operating system calls are
executed here. To achieve best performance the most functions can be implemented
using simple "C"-language macros.
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
|
EC-Win
|
|
| |
|
|
| |
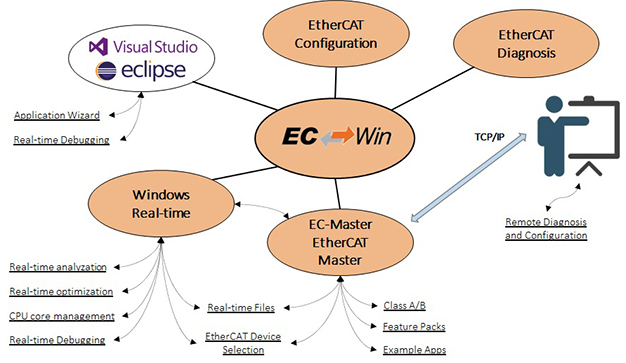
EC-Win provides a professional open real-time EtherCAT platform for Windows systems.
Thus it is possible to create extremely fast, deterministic real-time solutions that are
based on the more and more popular EtherCAT technology. Typical applications are motion
controllers, PLC controllers or real-time measurement applications with cycle times up
to 20 kHz. Core component of EC-Win is the powerful EC-Master Stack which was
specifically optimized to match with the proven and reliable acontis Windows Hypervisor
and real-time technology, respectively.
|
|
| |
|
|
| |
|
|
| |
Customers get a perfectly matching, powerful real-time EtherCAT programming environment;
a one-stop, single-source solution with an attractive price. Typically, multicore
systems will be used as hardware platform. Windows then runs on separate CPU cores as
the EtherCAT master and real-time application run. Fast and optimized drivers for Intel
and Realtek network controllers ensure highest possible performance. Also integrated
into the EC-Win hypervisor platform is the option to synchronize EtherCAT slaves with
the real-time application; the local PC timer will run synchronously with the EtherCAT
slaves that are using Distributed Clocks. EC-Win is complemented with the EC-Engineer
configuration, diagnosis and monitoring tool. Microsoft Visual Studio is used as
integrated development and debug environment for both, the Windows part as well as the
real-time/EtherCAT part of the application. Using EC-Win customers get a means to avoid
costly plug-in cards as well as separate hypervisors or Windows real-time extensions.
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
|
EC-Engineer / EC-Engineer Web
|
|
| |
|
|
| |
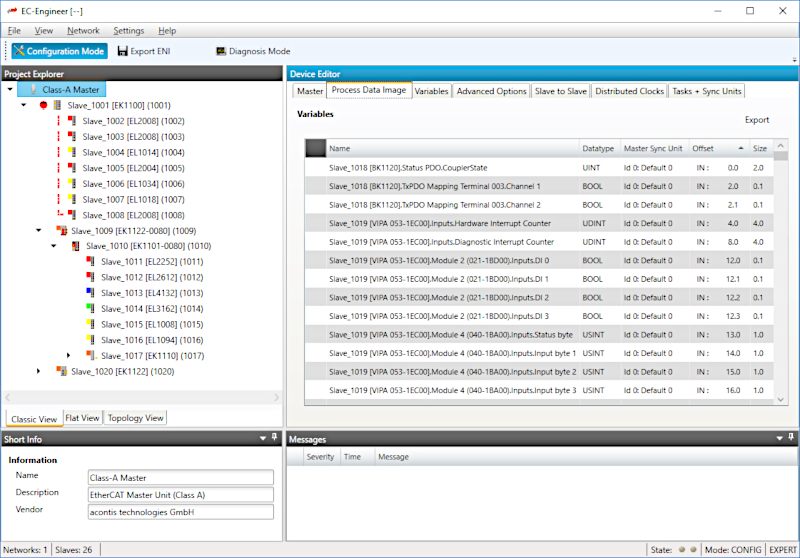
EC-Engineer is a powerful software tool used for configuration, diagnosis, and
monitoring of EtherCAT® networks. Using this single tool one can handle
all required
engineering and diagnosis tasks in a quick and comfortable way. The modern, clear and
very intuitive user interface, which is also rarely using popup dialogs, is crucial for
a smooth experience in configuring, diagnosing, and monitoring of
EtherCAT® systems.
|
|
| |
|
|
| |
|
|
| |
General Features
|
|
| |
|
|
| |
- Configuration of multiple master systems within one project
- EtherCAT Slaves connected to the Windows PC
- EtherCAT Slaves connected to the control system
- Tree View and Topology View
- ESI and EMI Manager
- Multiple Languages
- Modern User Interface based on Microsoft WPF technology
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
|
EC-Inspector
|
|
| |
|
|
| |
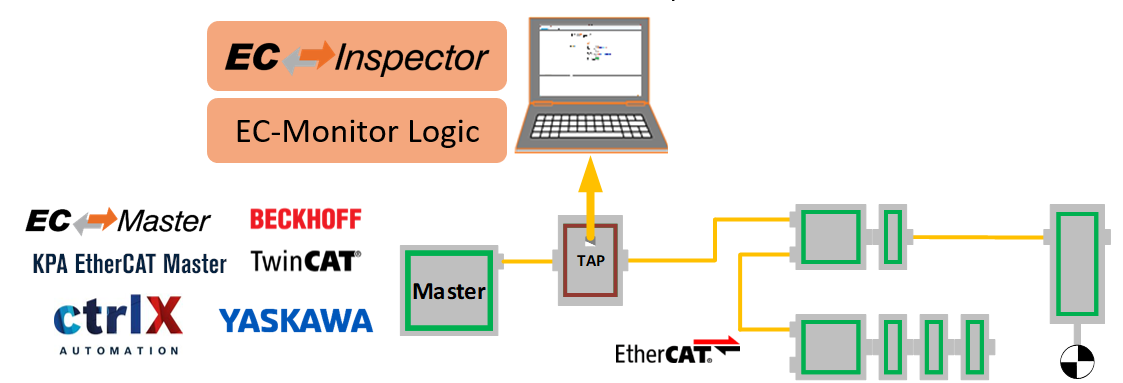
EC-Inspector is an easy to use software application for Windows for analyzing and
monitoring EtherCAT networks. The program can be used independently of the master
controller and works with EtherCAT masters from many manufacturer (Beckhoff, Omron,
Bosch-Rexroth, Lenze, acontis, etc.). EC-Inspector analyzes the complete data traffic
between the master and the EtherCAT slaves via a TAP (Test Access Point) device inserted
after the master. The TAP device enables both the outgoing frames (Master →
Slaves) and
the incoming frames (Master ← Slaves) to be recorded and evaluated.
|
|
| |
|
|
| |
|
|
| |
Features
|
|
| |
|
|
| |
- Analyzing and Decoding the EtherCAT Protocol
- Utilizes the EtherCAT Network Information (ENI) file
- Monitoring of Process Data Variables including Trigger Conditions
- Monitoring of Slave Error Counters (ESC registers 0x300 to 0x313)
- Processing of Previously Captured and Saved Raw Network Traffic (Wireshark files)
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
|
EC-Lyser
|
|
| |
|
|
| |
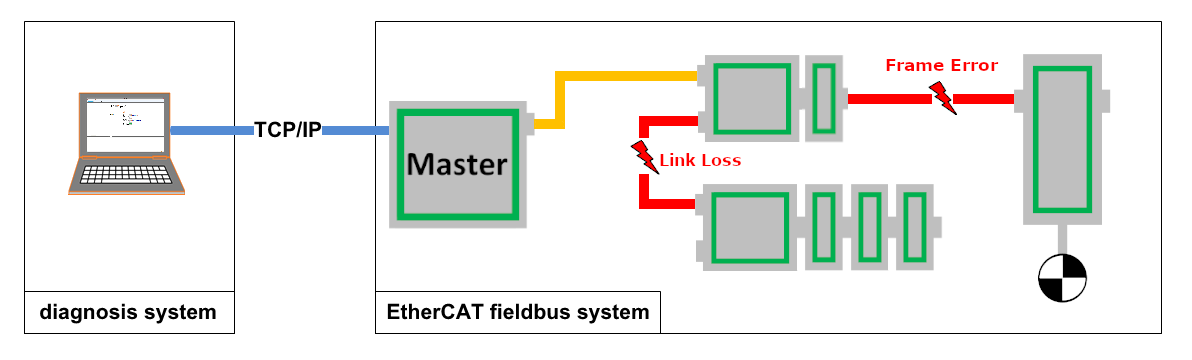
EC-Lyser is a diagnosis application specifically developed to analyze EtherCAT bus
systems that are controlled by the acontis EC-Master Stack. Automated control systems
usually require high availability of the whole system. Due to the rough industrial
environment this is often hardly to achieve. Possible reasons for failure are:
|
|
| |
- bad cables or plugs
- vibrations
- system degradation (temperature, oxidation, mechanic failure, ...)
- electromagnetic fields
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
|
EC-Simulator
|
|
| |
|
|
| |
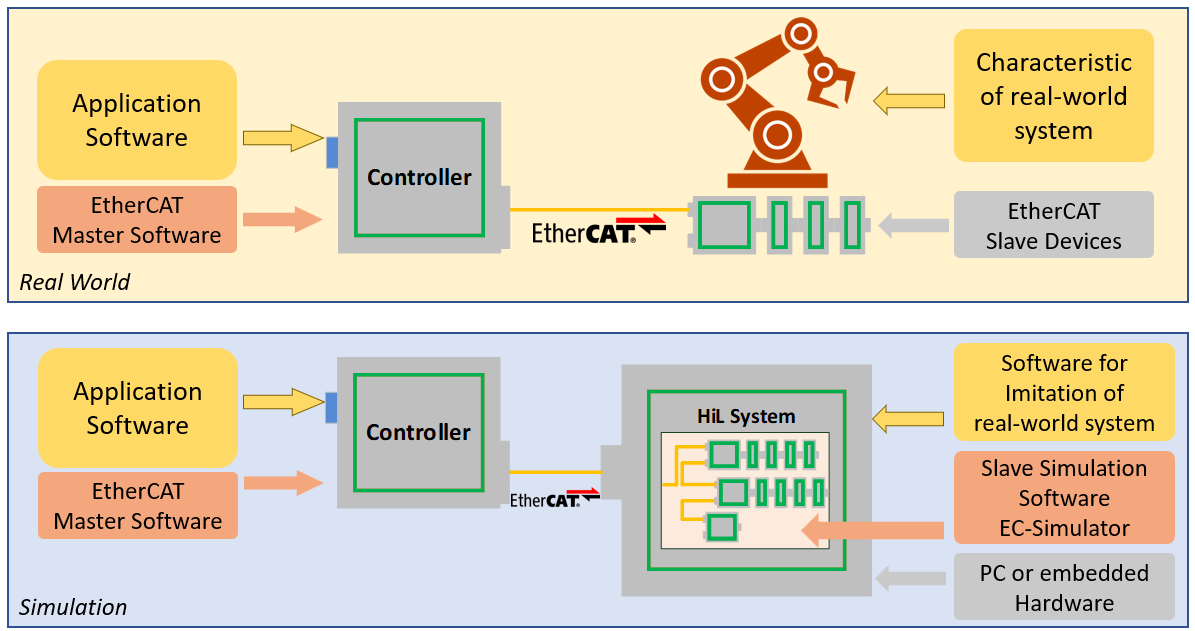
EC-Simulator virtualizes EtherCAT networks by simulating the EtherCAT slave devices in
order to run EtherCAT Master applications without real EtherCAT slave hardware devices
available.
EtherCAT simulation is possible via a physical network adapter, or also virtually, to
realize a completely simulated machine setup. Configuring the simulation instance is
seamless using the ENI file of the real network.
With EC-Simulator it is possible to react to Process Data (PDOs), send and receive
Service Data (SDOs), interact with the Slave Stack, and more. This is all possible to be
programmed via the API available for C/C++ or .NET, enabling the connection of EtherCAT
data to various other professional software tools for the imitation of real-world
systems.
|
|
| |
|
|
| |
|
|
| |
Features
|
|
| |
|
|
| |
- Simulation of up to 2000 EtherCAT slaves
- Slaves with and without mailbox protocol support
- Mailbox protocol CAN application protocol over EtherCAT (CoE)
- PDO configuration and assignment commands via CoE
- Mailbox protocol Vendor over EtherCAT (VoE)
- Mailbox protocol File access over EtherCAT (FoE)
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
|
EC-STA
|
|
| |
|
|
| |
The EC-STA EtherCAT Slave Test Application is useful for manufacturers of EtherCAT slave
devices to perform comprehensive tests based on the proven and widely used EC-Master
stack. Typically, the EC-STA will be used while creating and testing EtherCAT slave
software as well as for slave production tests. The core component of the EC-STA is a
Windows application based on the Microsoft .NET technology and written in the C#
programming language. As the complete source code is included, the user is able to add
customer-specific functions very easily, for example running automatic, script based
test sequences. The EC-STA offers a comfortable and clear user interface with many
features and allows testing any existing EtherCAT slave device.
|
|
| |
Features
|
|
| |
|
|
| |
- Selection of EtherCAT Network Information (ENI) File
- Perform Master State Changes
- Perform Slave State Changes
- Display Process Data Input and Output Area
- Mailbox Protocol "CAN application protocol over EtherCAT (CoE)"
- Read Object Dictionary (SDO Information Service)
- Read and Write CoE Object (SDO Upload and Download)
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
|
EC-EAP
|
|
| |
|
|
| |
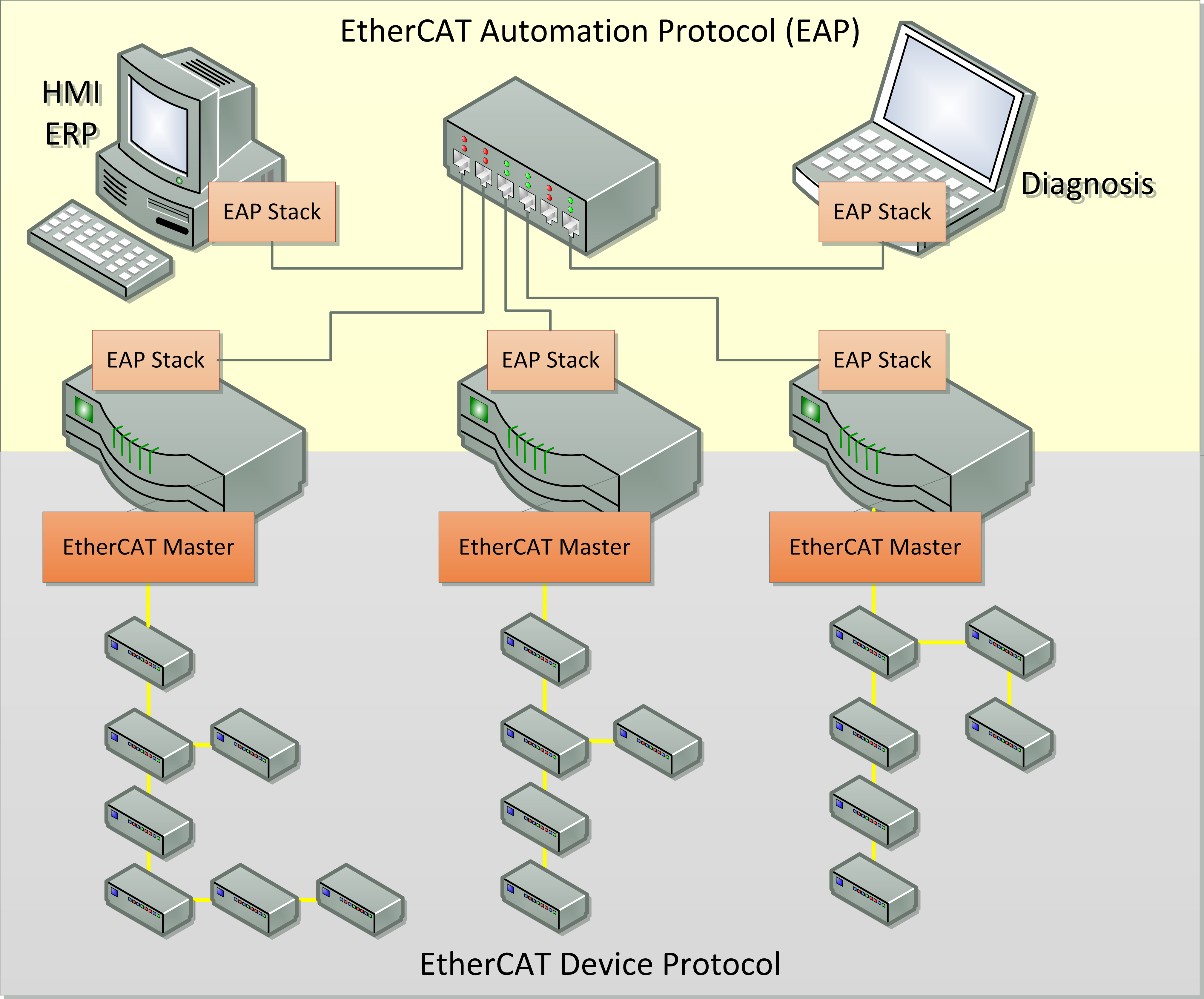
The EtherCAT Automation Protocol (EAP) defines interfaces and services for an equal
exchange of information between controllers (master/master communication) or for
interfacing with a central master computer. The cyclic EAP communication can be handled
directly in the user data of an Ethernet telegram, without the need for an additional
transport or backup protocol. The EAP therefore enables very efficient data exchange
without significant protocol overhead, with cycle times down to one millisecond or even
faster. EAP is the preferred choice to implement a fast controller to controller
communication. The protocol can used on any system equipped with a Standard Ethernet
Controller. The lean protocol is suitable for high performance PCs as well as for low
power ARM controllers.
|
|
| |
|
|
| |
|
|
| |
|
|
| |
|
|