| |
|
|
| |
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PC CAN
Softwares |
|
|
|
|
|
PCAN-Explorer
|
|
| |
|
|
| |
PCAN-Explorer 7 - Explore the Difference
|
|
| |
|
|
|
Professional
Windows® Software for CAN, CAN FD and CAN XL
|
|
|
|
|
| |

|
|
| |
|
|
| |
Version 7 of PCAN-Explorer introduces a suite of new features to streamline your daily
tasks in the CAN world, making them more efficient, comfortable, and straightforward. It
includes the latest CAN standards, namely CAN XL and J1939 FD, along with the ability to
script tasks with Python. Thus, you'll be ready to explore the future of CAN.
|
|
| |
|
|
|
|
|
| |
|
|
| |
* Users who want to try out PCAN-Explorer 7 before buying can download and use a free
trial license. It provides full functionality of PE7 including all Add-ins - free of
charge for 30 days. It can be received by sending a request to our Technical Support
Team. Get your Trial License now!
|
|
| |
|
|
|
Core Features and Highlights
|
|
| |
|
|
| |
CAN XL Support

CAN XL is the next generation of the CAN bus. CAN XL nodes use the same
two-line High-speed CAN cabling as previous versions and are
backward-compatible with CAN FD and CAN CC (Classic) devices. CAN XL provides
data bit rates of up to 20 Mbit/s and a significantly higher payload of
up to 2048 bytes per message. Additionally, CAN XL has predefined
structure elements that signal specific data types to other XL nodes. This
includes tunneling, virtual networking, and protocol extensions, such as
security enhancements.
embOS is a priority-controlled real time operating
system (RTOS), designed to be used as a foundation
for the development of embedded real-time
applications. It is a zero interrupt latency,
high-performance RTOS that has been optimized for
minimum memory consumption in both RAM and ROM, as
well as high speed and versatility.
|
|
|
|
|
|
| |
|
|
| |
Apply Multiple Symbol Files
Up to PCAN-Explorer 6, only a single Symbol file, the CAN database format by
PEAK-System, could be applied to a connection. When a new device was
integrated into the CAN network, the corresponding definitions for CAN
messages had to be merged into the existing Symbol file.
Now it is easy to add CAN message definitions flexibly to a Connection in
PCAN-Explorer 7 by just applying the necessary additional Symbol file. The
same can be done with third-party databases. The corresponding software
support is provided by the Add-ins CANdb Import and AUTOSAR XML Import
(available as bundle).
|
|
|
| |
|
|
|
|
|
| |
|
|
| |
Python Scripting
In addition to VBScript, PCAN-Explorer 7 now has an implementation of the widely used Python scripting language, known for its clear structure and its powerful standard library. With Python you can access the full Object Model of PCAN-Explorer 7 and create small automation tasks for your daily work in CAN environments.
|
|
|
| |
|
|
|
|
|
| |
|
|
| |
Enhanced Licensing
PCAN-Explorer 7 uses the established CodeMeter licensing tool, with which you may already be familiar from other software applications. This offers flexible licensing options, including the new floating licenses for your enterprise environment. You can also use a self-hosted licensing server. Of course, single-user licenses and those using license dongles are available.
|
|
|
| |
|
|
|
|
|
| |
|
|
| |
Fine-Graded Trace Playback

When playing back a CAN trace file to your CAN bus for testing purposes, for example, you may not only want to replay the entire data stream at once but also go through the CAN messages in meaningful chunks using breakpoints. You can even single-step through the trace files. Text-based trace files from PEAK-System tools can be used directly. Many other file formats, such as MDF4 and BLF, can be imported.
|
|
|
| |
|
|
|
|
|
| |
|
|
| |
J1939 FD Support

The SAE J1939 standard has been extended with J1939 FD which defines the use of CAN FD frames. The same Parameter Groups are used as in classic J1939, while the transport layer is optimized to benefit from higher data rate and larger payloads of CAN FD, especially for multi-packet messages.
You can take advantage of analyzing J1939 FD traffic with PCAN-Explorer 7 and its J1939 Add-in.
|
|
|
| |
|
|
|
|
|
| |
|
|
| |
Highlighting Data Changes

Wondering if any incoming CAN message has changed its data since the previous reception? In the Receive list of CAN messages and in the Watch window for Signals, this can now easily be detected visually, as changes in data bytes are highlighted.
|
|
|
| |
|
|
|
|
|
| |
|
|
| |
Improved Performance
The daily work experience with PCAN-Explorer 7 benefits from the 64-bit foundation and separate engines for communication tasks and the user interface.
|
|
|
| |
|
|
|
|
|
|
|
|
|
PEAK PCAN-Explorer 7
|
|
|
|
|
|
|
PCAN-Explorer 7 is a
comprehensive, professional
software for working with CAN CC
(Classic), CAN FD, and CAN XL
buses. By connecting to one or
more CAN buses, users gain
access to a wide range of
options for monitoring the CAN
traffic, individual messages, or
specific data signals. Through
manual or periodic message
transmission, the bus can be
directly influenced, for
example, for control purposes or
simulations. |
|

|
|
|
|
|
|
|
|
| |
|
|
| |
|
|
|
|
|
|
|
|
|
PCAN-Explorer 7: Plotter Add-in 7
|
|
|
|
|
|
|
The Plotter Add-in allows the
recording and graphical
representation of any number of
signal courses. Signal sources
can be the data from incoming
and outgoing CAN messages as
well as virtual variables and
results from macro calculations. |
|

|
|
|
|
|
|
|
|
| |
|
|
| |
|
|
|
|
|
|
|
|
|
PCAN-Explorer 7: Instruments Panel Add-in 7
|
|
|
|
|
|
|
The Instruments Panel Add-in
allows the graphical
representation of digital and
analog signals using different
display instruments. The
integrated input options and
controllers make it possible to
also generate messages on the
CAN bus. This allows the
realization of simple
simulations, test benches, and
complex monitoring applications. |
|

|
|
|
|
|
|
|
|
| |
|
|
| |
|
|
|
|
|
|
|
|
|
PCAN-Explorer 7: Bus Descriptions Add-in 7
|
|
|
|
|
|
CANdb and AUTOSAR XML are common
data description formats for CAN
bus information in the car
industry and further areas.
The Bus Descriptions Add-in
includes the former CANdb Import
Add-in and the new AUTOSAR XML
Import Add-in allowing the use
of those formats in PCAN-Explorer
7. Furthermore, specific bus
descriptions from such files can
be imported into our Symbol file
format using the PCAN-Symbol
Editor. Vice versa, an export to
.dbc files is possible too.
|
|

|
|
|
|
|
|
|
|
| |
|
|
| |
|
|
|
|
|
|
|
|
|
PCAN-Explorer 7: J1939 Add-in 7
|
|
|
|
|
|
The SAE J1939 network protocol
describes communication on a CAN
bus in utility vehicles for the
transmission of diagnostics data
and control information. It
contains a complete network
definition using 29-bit CAN IDs.
In addition to J1939 with CAN CC
as its basis, J1939 FD based on
CAN FD was implemented to enable
higher data rates and improve
responsiveness.
The J1939 Add-in for PCAN-Explorer
supports all definitions
established by the standard’s
parameter groups and provides an
easy way to access the
parameters. A database with all
the definitions and parameters
contained is included and is
updated regularly in case of an
active maintenance contract.
Custom Parameter Groups can be
defined, also based on PGs from
the database.
|
|

|
|
|
|
|
|
|
|
| |
|
|
| |
|
|
|
|
|
|
|
|
|
PCAN-Symbol Editor 7
|
|
|
|
|
|
The Symbol format developed by
PEAK-System translates the
hexadecimal display used for CAN
data traffic into a format that
the user can understand.
To create a Symbol, names are
first assigned to the individual
CAN IDs. The interpretation and
presentation of CAN data is
defined using signals with
various parameters, such as name
and output format. The Symbol
created in this manner enables
easy allocation of incoming and
outgoing CAN messages and
ensures that the CAN data is
readable.
|
|

|
|
|
|
|
|
|
|
| |
|
|
| |
|
|
|
|
|
| |
|
|
|
PC Software
|
|
|
|
|
|
PCAN-View
|
|
|
|
|
|
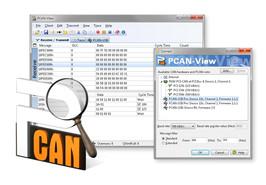
The software PCAN-View
for Windows is a simple CAN monitor for viewing, transmitting, and
recording CAN data traffic.
Messages can be transmitted manually and periodically at a
user-determined bit rate. Bus system errors and memory overflows in
the CAN hardware are displayed during the
process. The trace function can be used to record and save CAN data
traffic.
PCAN-View is supplied with every PCAN PC hardware product and allows a
quick and easy start. All available PEAK CAN interfaces are listed in
the connection dialog. After
selecting the hardware and the bit rate, the user can access all the
software functions, hardware-specific settings, and information.
|
|
|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|
|
|
|
|
PLIN-View
Pro
|
|
|
|
|
|
The LIN monitor
PLIN-View Pro for Windows is supplied with every PC LIN interface
from PEAK-System. Incoming LIN
messages can be viewed using this software, with the use of LDF files
(LIN Description File) allowing the symbolic depiction of LIN
messages. Outgoing LIN frames can be
defined depending on the master or slave operation mode.
PLIN-View Pro also accesses the LIN functionality of the supported
hardware, such as the on-board scheduler or automatic bit rate
detection.
|
|

|
|
|
|
|
|
|
|
| |
|
|
|
|
|
|
|
|

